![]()
Future Robotic Residents in Experimental Caverns: Advancements in Detector Technology at CERN's EP Department
In 2020, CERN's Experimental Physics Department launched an ambitious project of research and development (EP R&D) for future detectors technologies. This comprehensive initiative tackles advancements in various areas, including sensors, electronics, software, and mechanics.
As part of this effort, within the EP R&D Mechanics Group, we are pioneering the use of robots in the experimental cavern to automate tasks like installation, inspection, disconnection, and maintenance of detectors. This automation promises to streamline the processes, reduce personnel exposure to radiation, and ultimately improve both safety and efficiency. We envisage robots will play a crucial role in several activities, including inspection, verifying alarms, mapping the environment during beam operation, and even handling detectors themselves.
Although robots are already utilized in the accelerator at CERN, their deployment in the experimental caverns introduces entirely new challenges, spanning from interfacing with delicate detectors to navigating the cavern's unique and harsh environment.
While radiation remains a shared concern with the accelerator, new requirements arise due to the experiment's magnetic field, the intricated ladders and steps environment, and the confined spaces in between the fragile detectors and services. Navigating these complexities presents a fresh set of obstacles that we are addressing within the EP R&D Mechanics Group to effectively implement off-the shelf robotic solutions and develop new ones.
One major obstacle unique to this application is the presence of high magnetic fields within the cavern close to the Experiment magnets, with no similar needs elsewhere in the market. We have dedicated significant effort to understanding how this field impacts the mechanics, motors, and control systems of several robotic systems. This research, conducted in collaboration with University of Rome “La Sapienza”, has led to the development of a model that predicts the forces acting on an electromagnetic motor within the magnetic field.
The initial focus of the R&D programme has been on finding robotic solutions for two main functions: inspection of the experimental cavern, and detector installation and disconnection.
For cavern inspection, mapping, and initial interventions, the approach has been to identify different movable platforms and equip them with specific payloads. Both ground and aerial solutions are currently being developed.
Quadruped robots, known for their agility, have been recognized as a suitable solution for inspection tasks in the experimental cavern, opposite to the wheel solution adopted in the accelerator. ANYmal from ANYbotics underwent testing in the ALICE cavern in 2021, and SPOT from Boston Dynamics was also considered. Finally, the acquisition of the UNITREE Go1 Robodog marked the initial achievement of a collaboration program between EP-DT and BE-CEM, framed within the EP R&D program, and focused on creating a custom robotic solution specifically designed for the CERN cavern environment.
Successful tests with the Robodog have been conducted in the ALICE experimental cavern, demonstrating its capability to operate autonomously, stepping stairs, avoiding obstacles, and providing initial data on its behaviour when operating in close proximity to the Experiment magnet. The next phase involves improving its functionality in stronger magnetic fields and its ability to verify alarms, open and close gates, and read gauges while the beam is operational. Work is indeed also focusing on the payload for specific inspection tools, sensors and a robotic arm for first-level intervention.

Figure 1: Chris Mcgreavy (BE-CEM) (left) and Luca Bernardi(EP R&D) (right) with the Robotdog in the ALICE cavern during a magnetic field test.
Furthermore, we are investigating the use of a small swarm of robots, each a few centimetres in size, to inspect tight and cluttered spaces within the cavern. These compact robots are specifically designed for manoeuvring in confined areas and would serve the need to find leaks or anomalies in between intricate detector services that have triggered alarms. A primary focus for the EP R&D group is the development of a protocol that guarantees uninterrupted communication between robots, particularly in deep and confined spaces. This protocol incorporates a mobile mesh network, that facilitates the efficient flow of data via the shortest path. This ensures that information originating from the deepest robot inside the Experiment can reach the external one, which is linked to the CERN network and thus accessible to the remote operator.

Figure 2: Paolo Scaramuzzino (EP R&D) working at mini-quadruped swarm for confined space inspection.
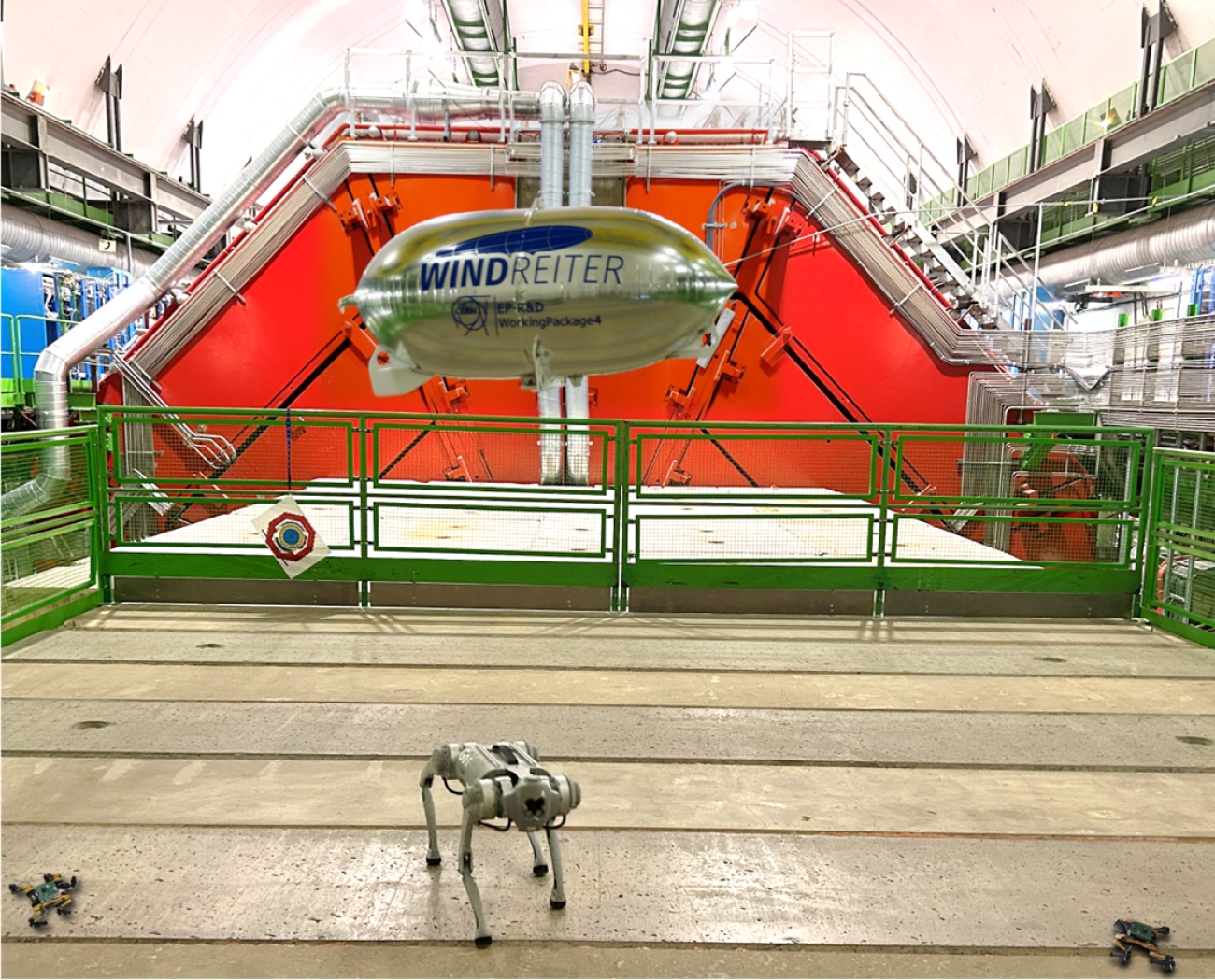
To complement our ground-based inspection efforts, we are working on deploying blimps (instrumented balloons) for aerial environmental mapping. Blimps have been preferred over drones due to the minimal risk of damage that an impact could induce on the delicate hardware and services of the detector. In collaboration with Windreiter, an external company, a blimp capable of manoeuvring in CERN cavern environments is being developed. A prototype's mobility and remote controllability were successfully demonstrated in the ALICE cavern in December 2022, as illustrated in Figure 3. These blimps are designed to maintain precise positioning and adapt to changing environmental conditions within the cavern. The focus is on equipping the blimps with specialized sensors for both visual inspection and for mapping magnetic fields and radiation, enabling them to autonomously navigate predefined routes. Implementing an indoor positioning system is crucial for accurate navigation and mapping activities.

Figure 3: Francesco Mazzei (EP R&D) (left) and Lorenzo Teofili (EP R&D) (right) with a blimp in the ALICE cavern during a fly test.
In parallel with the inspection tasks, we are working on developing future detectors with facilitated automated extraction and insertion, along with robotic connectivity for service disconnection and reconnection. The work performed in these years has shown that a crucial feature of a robotic-friendly particle detector is the integration in its design, at a very early stage, of interfaces for quick interaction between the detector and the robotic systems.
ALICE 3 new Experiment for LS4 serves as a case study, where a single robotic system is being designed to facilitate all aspects of the different detectors installations, all using a common interface.
Additionally, the upgrade of AMS (the Alpha Magnetic Spectrometer), planned to take place in 2026, is serving as a learning opportunity on NASA's approach to a fully automated installation of a tracker detector on the ISS using the Canadarm, a large robotic arm.
The experimental cavern, as the depths of space, presents a challenging environment where robotic systems can play a crucial role in ensuring safety, minimizing human exposure to hazards, and maximizing the efficiency of interventions - that’s the exciting R&D that CERN is building to face future scientific endeavors.